
At present, ADAS has both binocular and monocular. The two use different technical routes in distance detection. There are also advantages and disadvantages in productization. The author talked about his own views. The author of this article is Jiang An, the CTO of Zhongke Huiyan.

The first step in the ADAS function is perception, which is to observe the road environment responsible for the surrounding vehicle. On this basis, the corresponding path planning and driving behavior decisions can be made. At present, the sensors used for sensing include various forms of radar, monocular cameras, binocular cameras, etc., or sensing systems formed by different combinations of these sensors, and these sensor components have their own advantages and disadvantages, and sensor fusion is the general trend.
Among them, the camera is indispensable, and the lane line obstacle and the pedestrian detection ADAS function can be realized by collecting the image of the road ahead. What is the focus on the selection of ADAS cameras? What are the differences between the single and double eye programs? Let me talk about my views here.
What are the requirements for ADAS camera imaging?
According to the needs of ADAS detection, the camera needs to have the following two characteristics when selecting:
One is to look far enough. The farther you look, the more time you have to make judgments and reactions to avoid or reduce the damage caused by accidents. The parameter that this type of camera focuses on is the focal length, and the longer the focal length, the farther it will be. However, the longer the focal length, the problem is that the narrower the angle of view, the compromise is needed.
The second is to require high dynamics. The use of a black and white camera with a high dynamic range can effectively suppress the halo phenomenon and enhance the details in the dark, thus improving the image quality. In addition, the color image is coated on the surface of the lens, which improves the perception of the human eye, but actually reduces the signal-to-noise ratio or the amount of information. This is detrimental to subsequent image processing.
According to these requirements, it is easy to find a kind of hype in the current industry. Many of the smart hardware used in the car are products such as driving recorders and cloud mirrors. The ADAS function will be added to the original imaging system. In fact, it is only the way manufacturers earn gimmicks.
Because the purpose of the driving recorder is to record the condition around the vehicle, the clearer the better, the more comprehensive the better, that is, "people friendly." This requires an imaging system with ultra-high resolution, super-good color reproduction, and an oversized wide-angle lens. The increased viewing angle means a reduction in focal length. This is in stark contrast to ADAS's requirements for imaging systems. The image quality required by ADAS is "machine friendly", so it is impractical to develop ADAS functionality based on the imaging system of the driving recorder. At present, many driving recorders that claim to have the ADAS function generally have only one function of lane line detection. Some have other functions such as collision warning, but the user experience is extremely poor.
Single/dual purpose ranging principle difference
At present, the camera ADAS has two schemes, monocular and binocular. The common feature of both is to collect image data through the camera and then obtain distance information from the image data. A very important role of ADAS is collision warning. Collision warning needs to pay attention to the change of distance, and it is necessary to estimate the time of the upcoming collision. With distance measurement, there will be a change in distance. If there is a distance change, there will be an estimate of the collision time, and finally there will be an early warning.
The principle of the approximate range of the monocular camera is to first identify the target (various models, pedestrians, objects, etc.) by image matching, and then estimate the target distance by the size of the target in the image. This requires an accurate identification of the target before estimating the distance, whether it is a car or a pedestrian, a truck, an SUV or a car. Accurate identification is the first step in accurately estimating distance.
To do this, you need to build and maintain a large database of sample features to ensure that the database contains all the feature data of the target to be identified. For example, in some special areas, in order to specifically detect large animals, a database of large animals must be established first; and for some other areas, there are some unconventional models, and the characteristic data of these models must be added to the database first.
If the characterization data of the target to be identified is lacking, the system will not be able to identify these vehicles, objects and obstacles, and thus the distance of these targets cannot be accurately estimated. Lead to underreporting of the ADAS system.
The method of binocular detection is to directly measure the distance of the front scene (the range captured by the image) by calculating the parallax of the two images without determining what type of obstacle is present in front. Therefore, for any type of obstacle, the necessary warning or braking can be performed according to the change of the distance information.
The principle of the binocular camera is similar to that of the human eye. The human eye can perceive the object's distance because the two eyes present a difference in the image presented by the same object, also called "parallax." The farther the object is, the smaller the parallax; on the contrary, the larger the parallax. The size of the parallax corresponds to the distance between the object and the eye, which is why 3D movies can give people a three-dimensional level of perception.

The people and coconut trees in the picture, the person in front, the coconut tree behind, the bottom is the imaging in the binocular camera. It can be seen that the person in the right camera image is on the left side of the tree, and the camera on the left side is in the image on the right side of the tree. This is because the angle of the double purpose is different. By comparing the two images, it can be known that the parallax is small when the human eye observes the tree. When observing people, the parallax is large because the distance between the trees is far and the distance between people is close. This is the principle of binocular triangulation. The binocular system is an absolute measure of the target object distance perception, not an estimate.
Advantages and difficulties of the single/binocular solution
The single purpose advantage is lower cost, less demanding computing resources, and relatively simple system structure. The disadvantage is that it must constantly update and maintain a large sample database to ensure that the system achieves a high recognition rate; it is impossible to judge non-standard obstacles; the distance is not a true measurement, and the accuracy is low.
The cost of the binocular system is higher than that of the monocular system, but it is still within the acceptable range, and the cost is lower than that of the laser radar and the like; the second is that there is no limitation of the recognition rate, because the principle does not need to be identified first and then measured. Instead, the obstacles are directly measured; the third is that the accuracy is higher than the monocular, and the distance is directly calculated by using the parallax; the fourth is that there is no need to maintain the sample database because there is no concept of the sample for binocular.
One difficulty of the binocular system is that the amount of calculation is very large, and the performance requirements of the calculation unit are very high, which makes the productization and miniaturization of the binocular system difficult. Therefore, it is more difficult to solve the dual-purpose calculation problem on the chip or FPGA. Most of the international research institutes or manufacturers use the server for image processing and calculation; some also simplify the algorithm and use FPGA for processing. At present, Zhongke Huiyan's computational efficiency on the chip has reached 15fps, and the computational efficiency on the FPGA+ARM architecture has reached 40fps.
Another difficulty lies in the dual purpose registration effect. A two-dimensional image representing the distance can be calculated by image registration of the binocular camera. The following figure shows the correspondence between the distance and the distance calculated by the Zhongke Huieye binocular scheme. The different saturation colors represent different distances, and the distance from warm to cool is from near to far. In the calculation process, noise and holes need to be well suppressed. As can be seen from the image to the right, the hue (distance) is a smooth transition with no transitions.
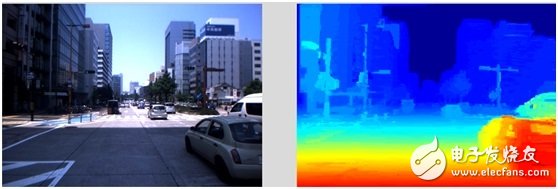
â–³Two-dimensional image obtained by Zhongke Huiyan distance calculation
Some FPGA solutions have many noises and holes, which are unfavorable for subsequent calculations and have security risks. For the identification of small obstacles, it is necessary to have no noise and voids, but also to show details. Otherwise, for example, a horizontal railing cannot be identified, which increases the risk of driving. The following figure shows the comparison between the small object and the pedestrian's detection of the Zhongke Hui eye binocular scheme and other international algorithms.

â–³Our is the binocular registration effect of the small obstacle of Zhongke Huiyan algorithm, and the other is the treatment effect of the international popular traditional method.
summary
Because of the difference in detection principle, the binocular camera has its own characteristics in terms of distance measurement, and its hardware cost and calculation level are doubled, which is a breakthrough. Just as Google's self-driving cars continue to accumulate a lot of experience and usage data, it is possible to accumulate step by step to achieve automatic driving. The binocular products of Zhongke Huiyan have completed the prototype and are also undergoing large-scale road test. From product theory and technology prototypes to products that are truly accepted by users, there is still a long way to go.
iPhone 7/7 Plus Housing Assembly
High quality back cover (Big Camera Hole)
& card tray & volume control key & power button & mute
switch vibrator key.
Replace your broken or unworkable part with a new one
Highly recommend professional installation, each item has been checked and in good condition before shipping.
Advantages:
1) Large stock , fast delivery, can meet large purchasing plan.
2) 100% Brand New, top quality.
3) Complete fit and work.
4) Supply quality warranty with professional service.
iPhone 7 Plus Back Cover,iPhone 7 Plus Cover Assembly,iPhone 7 Plus Assembly Housing
Shenzhen Aokal Technology Co., Ltd. , https://www.aokal.com